
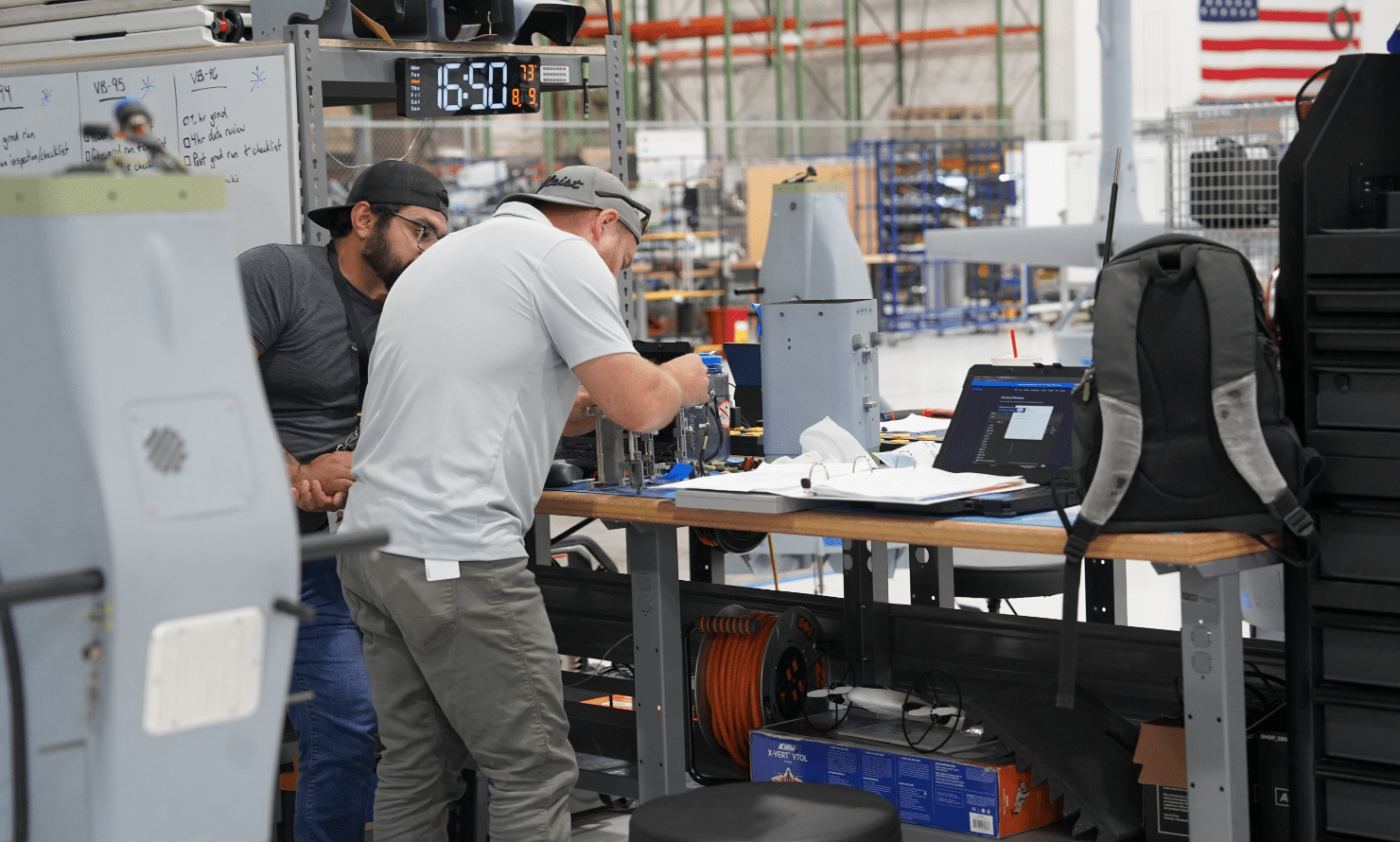
Working at the intersection of cutting-edge AI, autonomy, and robotics in a fast-paced, rapidly growing tech company is an engineer’s
Read More

From another company’s Slack: “…a big meeting in 2018 with Starlink in absolute shambles. Elon asks if anyone at the
Read More
With Shobhit Srivastava In an age where technology is redefining our skies, how do we ensure that our autonomous V-BATs
Read More
“The factory is the machine that builds the machine.” -Elon Musk The Pentagon’s recently-announced $1 billion “Replicator” program – dubbed
Read More

Our Summer Internship offers rising graduates a unique chance to delve into a vibrant, mission-driven environment. Over a ten-week paid
Read More
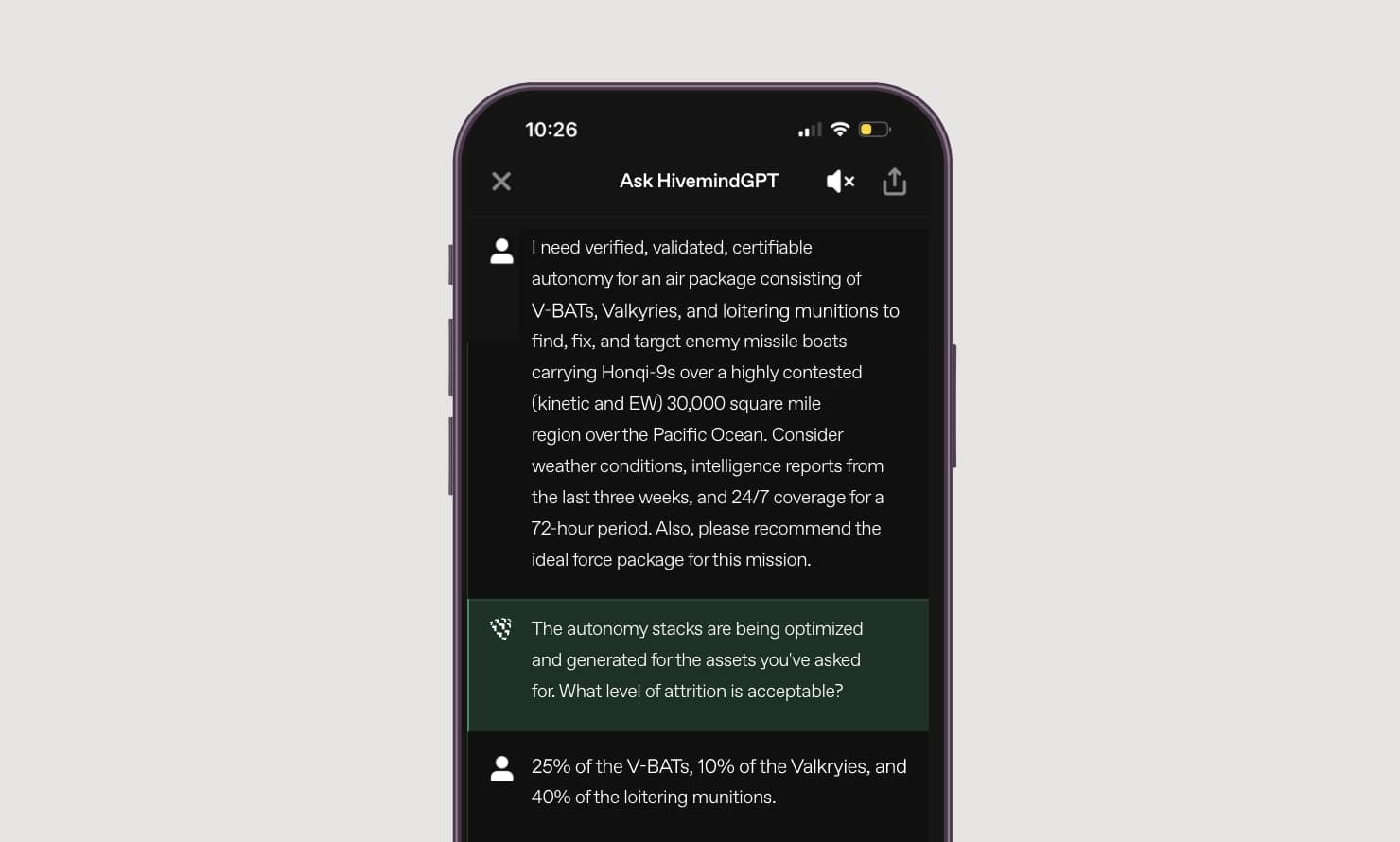
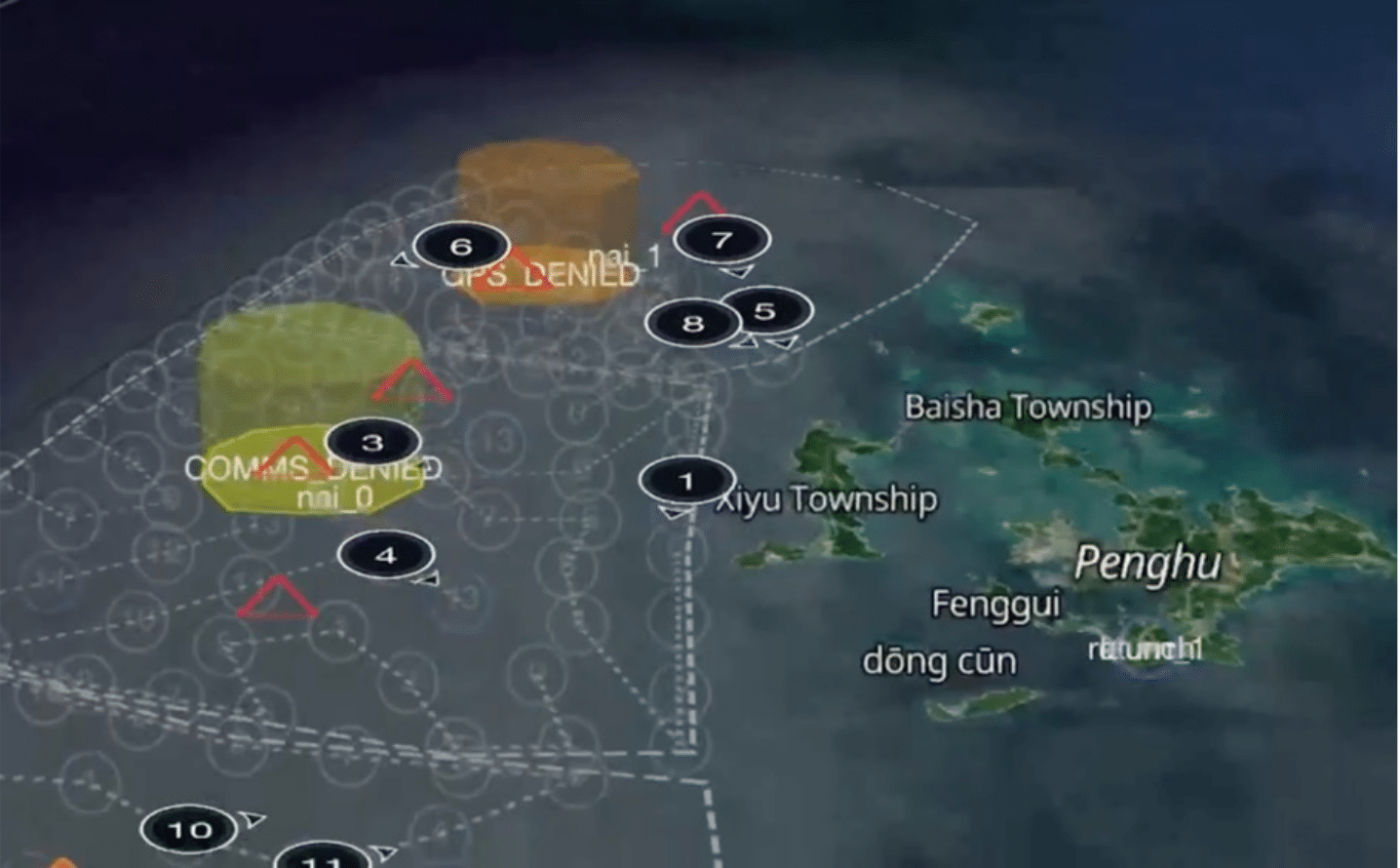
How Generative AI Will Enable Warfighters, Not Engineers, to Create Autonomy and Asset Mission Packages Imminently Scene Setter – Somewhere
Read More